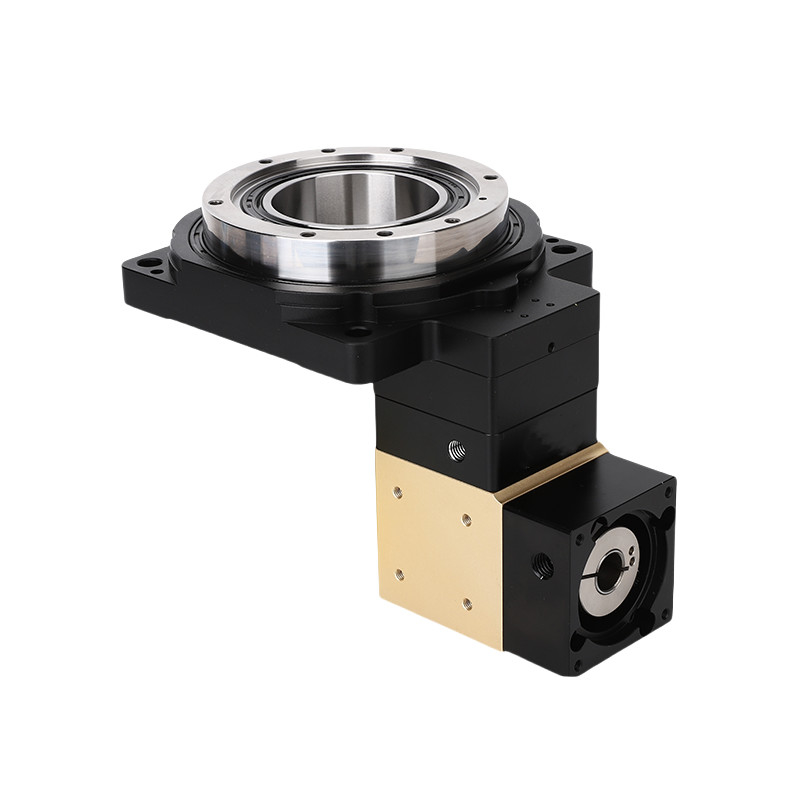
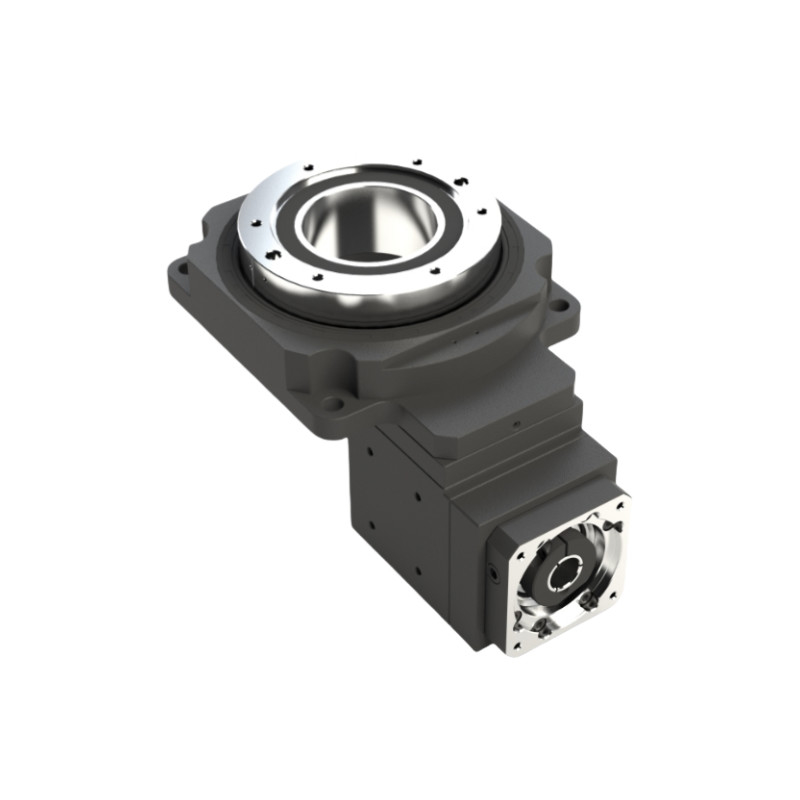
HRG 80Z-SerieRechte Winkel Hohl Drehtisch
Right Angle Hollow Rotary Table is a kind of rotating load device that specially designed for 90 degree force direction changes in some application for the purpose of spacing saving or special mechanism design.
Die Annahme des oberen spiralförmigen Schräggetriebes mit weichem Körper und die optimierte Gestaltung der Kontaktzahnoberfläche sorgen für eine gleichmäßige Belastung und ermöglichen ein hohes Drehmoment.Wenn es mit einem planetaren Reduktor kombiniert wird, wird das Getriebeverhältnis größer und erreicht bis zu 1:50.
Schlüsselkomponenten
Basisplatte: Das Fundament, das die gesamte Baugruppe stützt und die Montage auf Maschinen ermöglicht.
Rotationsmechanismus: Hierzu gehören Getriebe oder Motoren, die die 360-Grad-Rotation des Tisches ermöglichen.
Hohler Schacht: Der zentrale Hohlbereich, durch den Werkzeuge, Kühlmittel oder Leitungen durchlaufen können.
Tischboden: Die Oberfläche, auf der Werkstücke platziert werden, oft mit T-Schlitzen für die Befestigung.
Mechanismus zur Winkelregelung: Ermöglicht eine präzise Verstellung des Tisches, um die gewünschten Bearbeitungsstellen zu erreichen.
Lagersystem: Bietet eine reibungslose Drehung und Stabilität während des Betriebs.
Steuerungssystem: Kann digitale Ablesungen oder CNC-Integration für eine präzise Positionierung und Bewegung beinhalten.
Wesentliche Merkmale
Rechte Winkelkonstruktion: Ermöglicht vertikale und horizontale Bearbeitungseinrichtungen.
Hollow Center: Erleichtert die Bewegung von Werkzeugen oder Materialien durch den Tisch.
Präzisionssteuerung: Ausgestattet mit Mechanismen zur genauen Positionierung und Rotation.
Haltbarkeit: aus robusten Materialien gebaut, um schweren Bearbeitungslasten standzuhalten.
 |
Modell |
Modell |
Modell |
Verhältnis des rechten Winkels |
| Hohler Drehtisch |
Richtiger Winkel |
|
HRG85Z
|
HRG85 |
HAS060 |
2, 3
|
| Leistungsparameter HRG80Z-05 |
| Unterstützung der Ausgabeplattform |
Kreuzrollenlager |
Erlaubte Ausgangsgeschwindigkeit |
200 Rpm |
Rotationsinertität |
1203x10-6 kg.m2 |
| Schaltbewegung |
360° ((Rotation in jedem Winkel) |
Wiederholbare Positionsgenauigkeit |
±15 Bogensekunden |
Positionsgenauigkeit |
≤ 30 Bogensekunden |
| Passender Motor (Größe) |
200 bis 400 Watt Leistungsservomotor
Für den Fall, dass ein Fahrzeug mit einer Leistung von mehr als 5 kW nicht mehr als 5 kW hat, ist die Leistung von mehr als 5 kW zu verlangen. |
Zulässige Achsbelastung |
3000N |
Schmierung |
Synthetisches Fett |
| Reduzierungsquote |
10 |
15 |
Erlaubte Radiallast |
2000N |
Betriebstemperatur |
-10°C bis 90°C |
| Nennwert des Ausgangsmoments |
18NM |
Parallelisierung der Ausgabeplattform |
00,02 mm |
Dienstzeit |
20000h |
| Maximaler Drehmoment der Beschleunigung |
32.4NM |
Abfluss der Ausgangsplattformoberfläche |
0.01 mm |
Produktionsniveau |
IP65 |
| Notbremsmoment |
54NM |
Abfluss der Ausgangsplattform |
0.01 mm |
Geräuschpegel |
≤ 65 dB |
| Leistungsparameter HRG80Z-10 |
| Unterstützung der Ausgabeplattform |
Kreuzrollenlager |
Erlaubte Ausgangsgeschwindigkeit |
200 Rpm |
Rotationsinertität |
1203x10-6 kg.m2 |
| Schaltbewegung |
360° ((Rotation in jedem Winkel) |
Wiederholbare Positionsgenauigkeit |
±15 Bogensekunden |
Positionsgenauigkeit |
≤ 30 Bogensekunden |
| Passender Motor (Größe) |
200 bis 400 Watt Leistungsservomotor
Für den Fall, dass ein Fahrzeug mit einer Leistung von mehr als 5 kW nicht mehr als 5 kW hat, ist die Leistung von mehr als 5 kW zu verlangen. |
Zulässige Achsbelastung |
500 N |
Schmierung |
Synthetisches Fett |
| Reduzierungsquote |
20 |
30 |
Erlaubte Radiallast |
250 N |
Betriebstemperatur |
-10°C bis 90°C |
| Nennwert des Ausgangsmoments |
18NM |
Parallelisierung der Ausgabeplattform |
00,02 mm |
Dienstzeit |
20000h |
| Maximaler Drehmoment der Beschleunigung |
32.4NM |
Abfluss der Ausgangsplattformoberfläche |
0.01 mm |
Produktionsniveau |
IP65 |
| Notbremsmoment |
54NM |
Abfluss der Ausgangsplattform |
0.01 mm |
Geräuschpegel |
≤ 65 dB |
Detaillierte Bilder
Zeichnungen
Anwendungen der Hohl-Rotationsplattform
Robotik
Verwendet in Roboterarmen und -manipulatoren zur präzisen Positionierung und Bewegung bei Montageaufgaben und Materialbearbeitung.
Automatisierungssysteme
Integriert in automatisierte Produktionslinien für Aufgaben wie Sortieren, Verpacken und Palettieren, bei denen eine präzise Rotationsbewegung unerlässlich ist.
CNC-Bearbeitung
In CNC-Maschinen zum präzisen Drehen von Werkstücken bei Fräsen, Bohren und Drehen verwendet.
Medizinische Ausrüstung
In medizinischen Geräten wie Bildgebungssystemen, chirurgischen Robotern und Laborautomation für genaue Positionierung und Bewegung verwendet.
Luft- und Raumfahrt
Anwendung in Flugsimulatoren, Radarsystemen und UAVs zur präzisen Orientierung und Stabilisierung.
Telekommunikation
In Antennenpositionierungssystemen verwendet, um eine genaue Ausrichtung für eine optimale Signalübertragung zu gewährleisten.
Verpackung und Versand

 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!